
はじめに
最近復活させたブラーバですが、頭がいいです。
いつも適当なところからスタートさせるのですが、ほぼ同じ場所に戻って完了します。これは私が使ってるルンバやソージーにはない機能だと思います。
だから何?と思う人が多いかと思いますが、一応エンジニアなので「どういう仕組みなんだろう?」という思いが先にでます。
とりあえずGoogle先生に聞いてみてまとめました。
NorthStarキューブはあくまで補正らしい

これを机上などに置くことで自位置を把握できるようですが、我が家では使ってません。
これを使わなくてもかなりの精度でスタート地点へ帰ってきます。半径300mm以内くらい。
ブラーバは掃除をしながら、壁や障害物の位置を記憶するいわゆる「マッピング」を行ってるようです。旧型ルンバばかりの我が家ではかなり最先端の技術です笑。
自位置計算は、
- 車輪のエンコーダ
- ジャイロセンサー
のデータを基本とし、NorthStarキューブを使うとさらに高い精度で帰れる!ということのようです。
いや、その理屈はわかるけど、そのデータをどう処理して(数字をどうマップ化?)、どうマップ上に軌跡を残して、次の指令を出してるのか?、プログラマーの人ならなんとなくわかるんでしょうか?
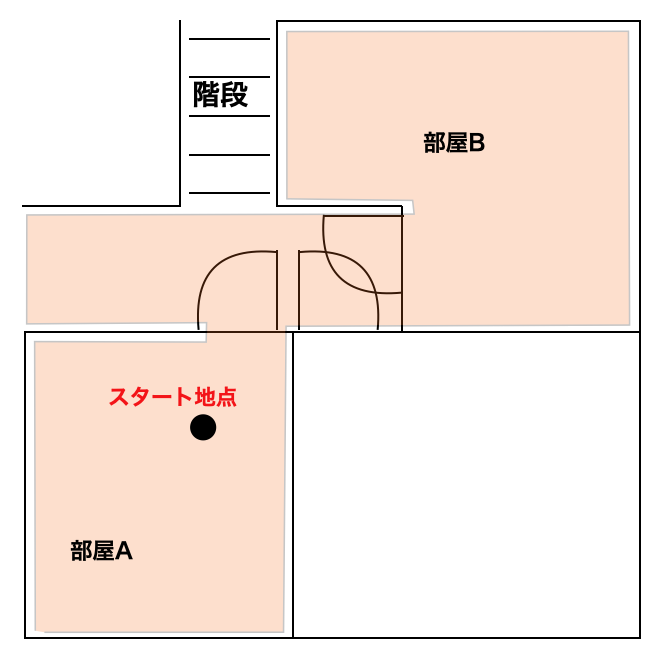
彼の主戦場はこんなレイアウトなんですが、ちゃんとスタート地点へ帰ってきます。部屋をまたいでも戻ってくるのはホント素晴らしい。2部屋と廊下をしっかりと掃除した上で帰ってきます。
ソージーなんかはベッドの下で力尽きてるなんてこともあるので笑
あと、意外と薄いカーペットの段差を検知できるので(7mmくらい)、カーペットの上を誤掃除せずに済んでます。せっかくフローリングで刈り取ったホコリを、カーペットへ塗り付けては台無しですからね・・・これはホントラッキーでした。カーペットを厚みのあるものに変えるか、壁を作るような細工が必要と思っていたので。

今後
ブラーバのアルゴリズムは、この年代/価格にしては結構凝ってます。となると新型のルンバや他メーカーのマッピングはどれくらいすごいんだろう?と思えます。
最近はレンタルシステムがヤフオクなどでもあるし、ちょっと新型のマッピング機能を試してみたいですね。


コメント